
ML/논문
[논문 리뷰] Orca: A Distributed Serving System forTransformer-Based Generative Models
minturtle
2025. 3. 25. 23:25
반응형
안녕하세요, 오늘은 이전에 발표한 vLLM이 사용하는 배치 최적화 기법인 Continous Batching(Iteration Level Batching)을 제시한 논문인 Orca: A Distributed Serving System forTransformer-Based Generative Models에 대한 리뷰를 해보도록 하겠습니다.
논문 원본 PDF는 아래와 같습니다.
https://www.usenix.org/system/files/osdi22-yu.pdf
본 논문은 22년 07월에 발표되었습니다.
Introduction
- 생성 모델을 사용하기 위해 별도의 서비스에 추론 절차를 위임하게 됨.
- 위임받은 서비스는 낮은 대기 시간과 높은 처리량으로 추론 결과를 제공해야 하며, Triton Inference Server와 Tensorflow Serving과 같은 추론 시스템의 개발을 촉진함
- 이러한 시스템은 실제 텐서 연산을 추론 시스템 내의 실행 엔진으로 수행할 수 있음
- 예를 들어, Triton과 FasterTransformer 를 결합하여 배포할 수 있음. 이 경우, Triton은 여러 클라이언트 요청을 배치로 그룹화하는 주된 책임이 있으며, FasterTransformer는 Triton으로부터 배치를 받아 배치 방식으로 추론 절차를 수행
- 다만 자동회귀 모델은 다음 토큰을 하나씩 생성하기 때문에 여러번 반복 수행
- 처리량을 늘리기 위해 배치로 처리하는데, 기존 시스템은 배치 내에 먼저 끝난 요청이 있어도 배치가 전부 끝날때 까지 기달려야함 → 대기 시간 증가
- 이 논문에서는 요청 대신 반복 단위로 엔진 실행을 예약 → 서비스 시스템은 엔진에서 반환될 때마다 요청의 처리가 완료되었는지 확인하고, 완료되면 즉시 반환
- 다만 반복 단위 배치를 적용하기 위해선 input token의 길이를 맞춰줘야함 → 선택적 배칭(특정 작업 집합에 대해서만 배칭)을 적용, 선택적 배칭은 작업의 다양한 특성을 고려하여 배치를 나누고 Attention1 작업에 대해 각 요청을 개별적으로 처리하며, Transformer 모델의 다른 작업에는 배칭
Background
Transformer & KV Cache
- AutoRegressive Transformer Model은 prefill 단계에서 입력 분석 및 첫번째 출력 토큰 생성
→ 다음 토큰 생성, 끝날 때까지 반복(decoding 단계)
- 어텐션은 모든 이전 토큰의 KV값이 필요 → 다시계산하는 것보다 KV Cache를 적용해 재사용 가능
ML Inference Serving System
- 사용자가 추론 서비스에 추론 요청 → 서비스는 미리 정의된 ML 모델을 기반으로 제공된 리소스를 사용하여 요청에 대한 응답을 제공
- 일반적으로 GPU나 TPU 같은 HW 가속기를 사용하며, 일반적으로 추론 프레임 워크의 아키텍처는 아래와 같음

- Endpoint: 외부로부터 request를 받아들이고, 처리된 response을 반환하는 인터페이스
- Request Queue: Endpoint로부터 전달받은 요청들이 대기하는 큐. 스케줄러는 이 큐에서 요청을 가져와 batch를 생성
- Scheduler: 요청 큐에서 요청을 가져와 엔진에 전달할 배치를 구성하고, 실행 엔진에게 전달
- Execution Engine: 스케줄러로부터 전달받은 배치를 실제로 처리하여 토큰을 생성
- 여기서 추론 서비스는 Execution Engine과 구분되어, 추론 과정은 Engine에게 위임하고, 그 외의 실행의 배치, 여러 모델 중 모델 선택, 모델의 배포하는 등의 측면에 집중한다.
- 하지만 Triton과 같은 기존의 스케줄러는 배치 내의 토큰이 먼저 끝나더라도 Early-Return이 불가능하다.
- 위 그림을 예시로 들어보자. x2가 iter2에서 <EOS>를 생성했지만, x1이 아직 끝나지 않았기 때문에 x1이 끝날때 까지 x2도 응답하지 못하고 대기해야 한다.
Challenges and Proposed Solutions
- Transformer 기반 생성 모델의 추론 프레임워크를 개발하는데 필요한 과제와, 이를 해결하기 위한 teration-level scheduling과 selective batching을 제시
Challange 1 : Early Return 및 늦게 들어온 요청
- 기존 시스템은 요청들을 배치(그룹) 단위로 처리
- 다만 배치 내의 모든 요청이 다 끝날 때 까지 먼저 끝나도 기다림
- 위에서 언급한 x2의 대기 문제
Solution 1 : Iteration-level Scheduling
- Early Return을 구현하기 위해 반복 단위 스케줄링을 수행
- 스케줄러는 매번 반복 단위로 작업을 처리하며, 아래의 과정을 거침
- 실행할 요청 선택(n개)
- 요청에 대해 하나의 반복을 실행(step, 하나의 토큰 생성)
- 생성된 토큰이 <EOS>이면 해당 요청 early return
Challange 2. 배치 처리의 어려움
- 배치 처리가 어려운 경우가 존재할 수 있다. 그 경우는 아래와 같다.
- 두 요청이 서로 다른 입력 크기를 가지는 경우
- 두 요청이 서로 다른 위치(인덱스)에서 토큰을 처리하는 경우
- 각 요청이 서로 다른 decoding, prefill 단계에 속하는 경우
Solution 2. Selective Batching
- 보통 배치 처리에서는 여러 요청을 함께 묶어서 처리하는데, 선택적 배치는 모든 연산에서 배치를 적용하는 대신, 일부 연산에만 배치를 적용
- 어텐션 외의 Norm 연산, GeLU 등은 입력 텐서의 크기를 맞춰줄 필요가 없으므로 배치 처리가 가능
- 어텐션 연산은 크기를 맞춰줘야 하므로 배치를 하지않고 요청마다 각각 수행
Orca Design
- Orca에 대한 아키텍쳐 설명
Distributed Arch.
- 모델을 여러 GPU에 분산 실행해야 할 필요가 생김
- ORCA는 Transformer 모델 병렬화 기술인 층 내부 병렬화(intra-layer parallelism)와 층 간 병렬화(inter-layer parallelism)를 조합하여 사용
- intra-layer parallelism는 행렬 곱셈(Linear 및 Attention 연산)과 연관된 매개변수를 여러 개의 GPU에 분산
- inter-layer parallelism는 전체 모델을 여러 계층으로 나누어 각 GPU에 분산
- 즉 두 병렬화 기법을 적용한다는 것은, 모델을 층별로, 층을 GPU별로 분산한다는 것을 의미
Execution Engine
- Orca는 추론 서비스 외에 실행 엔진 또한 구현했으며, 그 구조는 아래와 같음.
- 전체 구조 : 여러개의 Worker로 구성, Worker는 하나이상의 GPU를 제어
- 엔진 마스터: 스케줄러로부터 스케줄 정보를 받아 Worker들에게 전달하고, Worker들은 GPU를 사용하여 실제 텐서 연산을 수행
- Control Plane: 엔진 마스터와 Worker들의 컨트롤러 간의 통신을 담당, gRPC와 같은 별도의 통신 채널을 사용(메시지 내용, 토큰 정보)
- Data Plane : GPU 간의 데이터 전송을 담당, NCCL 사용
- Worker : 모델의 일부 레이어 담당, GPU 스레드 관리 및 GPU 커널 실행
- 파이프라인 : 엔진 마스터는 스케줄된 배치에 대한 정보를 첫 번째 Worker에게 전달하고, 각 Worker는 GPU 연산 완료를 기다리지 않고 다음 Worker에게 제어 메시지를 전달하다가, 마지막 Worker는 GPU 연산이 완료될때 까지 기다리고 결과를 반환
- 기존의 추론 시스템인 FasterTransformer이나 Megatron-LM과는 다르게, Orca는 Data Plane과 Control Plane이 구분되어 있어 GPU-CPU 간의 통신 오버헤드가 발생하지 않아 더욱 효율적임
Scheduling Algorithm
- Orca는 매 Iteration마다 어떤 요청을 선택할 것인지 결정
- 이때 Iteration 수준의 FIFO를 보장
- 배치 크기, GPU 메모리 제약(KV 캐시)을 고려해야 함.
- ORCA 시스템은 최적의 처리량을 유지하면서 대기 시간을 적절히 관리하기 위해, 최대 배치 크기라는 개념을 도입
- 스케줄러가 처리가 완료되기 전에 다른 요청의 이터레이션을 시작하려고 하면 DeadLock 발생가능, 이를 방지하려면 Orca 스케줄러가 미리 할당된 메모리 영역을 잘 관리해야하며, 남아있는 메모리 크기를 인식하고 새로운 요청을 처리할 수 있는지 여부 판단이 중요
- ORCA 스케줄러는 배치 크기와 GPU 메모리 제약을 모두 고려하여 아래의 방식으로 요청 처리
- 스케줄러는 요청의 도착 시간을 기준으로 요청을 선택. 가장 먼저 도착한 요청을 먼저 처리하도록 하며, 동시에 배치 크기를 최대 배치 크기로 제한
- 요청이 처음 스케줄링될 때, 키와 값을 저장할 충분한 공간을 예약. 이 예약은 Attention K/V 관리자가 키와 값을 저장하는 데 사용
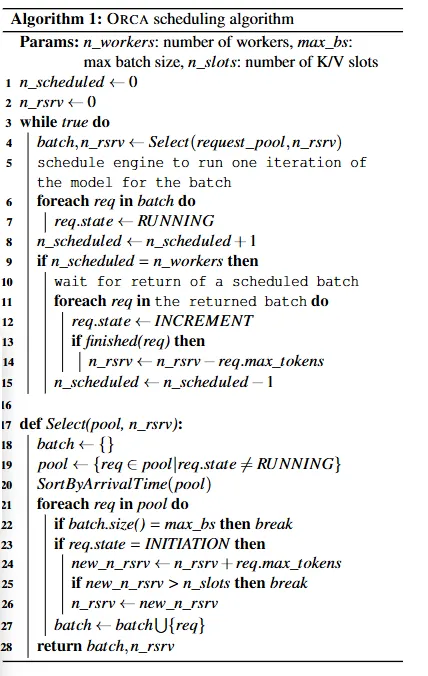
1. Select 함수

- 목표: max batch size(max_bs)가 넘지 않는 선에서 FIFO 순으로, GPU 메모리 제약 조건을 준수하면서 Attention K/V manager에 필요한 메모리 슬롯을 예약
- 입력:
- pool : 현재 요청들의 집합
- n_rsrv : 현재 예약된 Attention KV 슬롯의 수
- max_bs : max batch size
- n_slots : 최대 등록 가능한 Attention KV 슬롯의 수
- 알고리즘:
- 현재 실행중이지 않은(!RUNNING) req를 도착순으로 오름차순 정렬
- 정렬한 요청을 하나씩 탐색하면서, 아직 초기화 단계의 req라면 해당 요청의 최대 토큰 수만 큼 KV 슬롯을 예약 시도, 이 때 n_slots (최대 가용 슬롯수)를 초과하면, 메모리 부족으로 인한 순회 종료
- 순회 종료는 batch_size가 max_bs를 채웠을때도 종료
2. 스케줄링 알고리즘
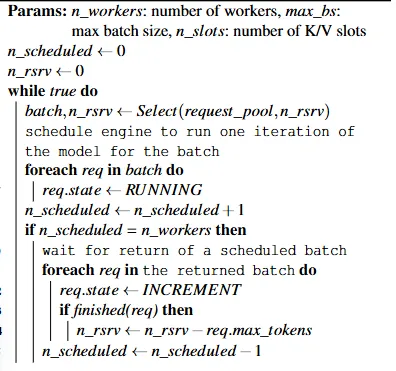
- Select 함수에서 req 선택
- 추론 엔진에 추론 명령 전달
- for req in batch do
- req의 상태를 RUNNING으로 변경
- 현재 스케줄된 작업의 수를 나타내는 n_scheduled 변수를 1 증가
- n_scheduled가 n_worker과 같다는 것은 모든 워커가 작업을 수행 중임을 의미, 더 작으면 req를 더 실행할 수 있음(6번을 실행하지 않고 다시 1번으로)
- n_scheduled == n_worker인 경우, 다음 작업을 위해선 스케줄된 배치 중 하나가 완료될때까지 대기
- foreach req in the returned batch do
- 요청의 상태를 INCREMENT, 즉 다음 iter를 위한 준비가 됨으로 변경
- 요청이 완료되었다면, 해당 요청이 사용한 KV 캐시 슬롯을 해제하고, n_scheduled를 1감소
- foreach req in the returned batch do
Evaluation
- FasterTransformer과 비교
- Megatron-LM이나 DeepSpeed도 있지만 추론 최적보다는 학습 최적
- 시나리오 2가지
- ORCA 엔진의 성능만을 테스트 하는 방법
- ORCA 스케줄러는 사용하지 않고, 테스트 스크립트가 요청 배치를 받아서 ORCA 엔진에 반복적으로 주입합니다. 이를 통해 ORCA가 각 요청을 어떻게 처리하는지 살펴봄
- 가정 : 실험에서는 모든 요청이 동일한 입력 토큰과 출력 토큰을 가진다고 가정합니다. 즉, 각 요청의 복잡도가 같다고 보고 성능을 평가
- 비교 대상 : 이렇게 얻은 배치 처리 시간을 다른 시스템인 FasterTransformer와 비교하여 ORCA의 성능을 분석
- ORCA의 엔드 투 엔드 성능을 테스트
- 실제 클라이언트 요청 트레이스가 없으므로, 합성된 요청 트레이스를 사용
- 합성된 요청 트레이스는 무작위로 생성된 가상 요청
- 모든 요청에 대해 <eos>를 생성하지 않고 max_gen_tokens 수만큼 생성한다고 가정
- 각 요청이 언제 도착할지는 포아송 분포를 사용하여 결정
- 성능 측정은 지연시간과 처리량으로 측정하며, FasterTransformer와 비교함
- ORCA 엔진의 성능만을 테스트 하는 방법
시나리오 1. Orca 엔진 테스트
- 배치의 모든 요청이 동일한 수의 입력 토큰(32 또는 128)을 가지며, 32개의 토큰을 생성하도록 설정
- 실험 세트에서 배치 내 모든 요청은 동시에 처리 시작과 종료가 이루어짐
- 13B, 101B, 175B의 세 가지 서로 다른 모델을 사용하여 실험을 진행

- 13B 1GPU에서는 fastertransformer가 batch크기가 8이상에서는 실행이 불가능
- 101B 8GPU에서는 16 batch size이상에는 처리가 불가
- 175B 16GPU 역시 16 batch size이상은 처리가 불가했으며, 전체적으로 Orca 엔진이 최대 47 %더 빠름

- 전반적으로 Orca가 FasterTransformer에 비해 더 높은 처리량과 낮은 지연시간을 제공하며, 모델이 커질수록 성능 향상이 두드러짐
- ORCA의 max batch size (max_bs)가 증가함에 따라 지연 시간에 큰 영향을 주지 않으면서 처리량이 증가하는데, 이는 Iter-level Scheduling이 early-finished 및 late-joining 요청 문제를 해결하기 때문
엔드 투 엔드
- ORCA는 배치 크기 증가로 처리량을 효율적으로 개선할 수 있지만, FasterTransformer는 특정 배치 크기에서만 성능 향상이 나타남

- 부하가 증가함에 따라 ORCA는 지연 시간의 증가가 상대적으로 작으면서도 더 높은 처리량을 제공
- ORCA의 스케줄러가 늦게 도착한 요청을 현재 진행 중인 배치에 효과적으로 통합할 수 있기 때문
- 다만 FasterTransformer는 아래의 시나리오를 효율적으로 처리하지 못함
- 서로 다른 시간에 도착하는 요청
- 완료하는 데 필요한 반복 횟수가 다른 요청
- 서로 다른 수의 입력 토큰으로 시작하는 요청
- 특히, inter-layer partitions을 두 개 이상 사용하는 175B 또는 341B 모델에서는 비슷한 수준의 지연 시간에서 ORCA가 훨씬 더 높은 처리량을 달성(약 37배)
- ORCA의 반복 수준 스케줄링의 early-return 문제와 late-joining문제를 해결하는 덕분에 배치 크기를 올릴수록 지연시간에 큰 영향을 주지 않으면서 처리량을 높일 수 있었음.
반응형